SLAM using multiple sound sources

|
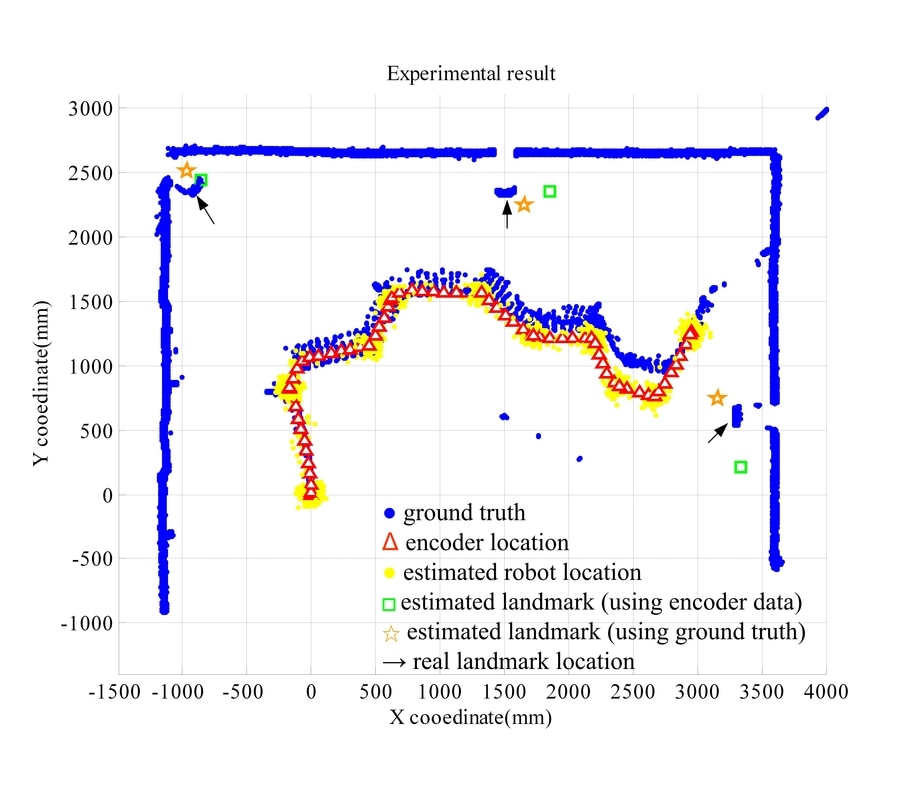
This work proposes a method that is able to simultaneously localize a mobile robot and unknown number of multiple sound sources in the environment. A DOA estimation method is used for real time application. After knowing the DOA information, a bearings-only SLAM (simultaneous localization and mapping) algorithm is introduced in detail. The estimated DOAs are known as the bearings information in the algorithm. As source signals are not persistent and there is no identification of the signal content, data association is unknown which is solved using particle filter.
|
|
|
